

 Descripción
Descripción
PaperStepper(L293D) es un driver de potencia para motores paso a paso bipolares utilizando el chip L293D o el SN754410.
Entradas de control: 2 TTL (D1 y D2, NO PASO y DIR)
Salidas de potencia 4 (L1,L2,L3 y L4)
Tensión alimentación: 5v
Tensión máxima salida: 36v
Corriente máxima salida: L293D=> 600mA por salida (picos de 1200mA)
SN754410 => 1000mA por salida (picos de 2000mA)
Entradas de control: 2 TTL (D1 y D2, NO PASO y DIR)
Salidas de potencia 4 (L1,L2,L3 y L4)
Tensión alimentación: 5v
Tensión máxima salida: 36v
Corriente máxima salida: L293D=> 600mA por salida (picos de 1200mA)
SN754410 => 1000mA por salida (picos de 2000mA)
Identificación del tipo de motor
El primer problema con el que nos encontramos al realizar proyectos con motores paso a paso, es identificar el tipo de motor que tenemos (sobre todo si utilizamos motores de desguace).
Para saber si un motor es "paso a paso", realizaremos la comprobación siguiente: Giraremos con la mano el eje del motor y deberemos notar que éste ejerce una resistencia al giro a golpes (o pasos).
Existen dos tipos de motores paso a paso: unipolares y bipolares. En los primeros la corriente circula siempre en el mismo sentido por cada bobina, y en el segundo se alterna cambia el sentido de la intensidad.
Un modo de identificarlos es contando el número de cables que tiene el motor:
4 cables (bipolar)

Necesariamente será bipolar. Para identificar los terminales, cojemos uno y con un tester medimos el resto de terminales, si es infinito, pertenece a la otra bobina, y si nó es el otro terminal de la bobina.
6 cables (unipolar-bipolar)

Para identificar los terminales, cojemos uno y con un tester medimos el resto de terminales, si es infinito, pertenece a la otra bobina, si con dos cables nos da R es terminal central (5 ó 6). Si con los dos cables restantes nos da R y 2R, puede ser el borne 1 o 2. Con las otras bobinas haremos lo mismo. De esta forma tendremos identificados los terminales centrales de cada bobina y sus extremos, pero no podemos distinguir los extremos. lo que haremos será utilizar el método de ensayo-error.
5 cables (unipolar-bipolar)

En este caso se han unido los terminales intermedios de las dos bobinas. El borne 5 es el único que mide R con el resto de los cables, el resto de cables (con los que mide 2R) deberemos intercambiarlos en la placa haste que el motor gire.
Para conectarlo deberemos unir los terminales 5 y 6 y si al conectarlo en la placa el motor no gira, deberemos alternar los terminales 3 y 4.
NOTA: Una página muy buena sobre motores paso a paso es la siguiente: Tutorial sobre motores paso a paso
Otra página muy interesante, con un simulación de funcionamiento de diferentes motores paso a paso y con diferentes tipos de paso (una forma muy fácil de entender los micropasos) y control nos la ofrece nanotec, una empresa alemana: http://en.nanotec.com/support/tutorials/stepper-motor-and-bldc-motors-animation/
Aunque la página está en alemán, puedes ver una traducción en la imagen inferior. Elige el tipo de motor, y elige una velocidad de demo.

Descripción
Para la realización de este proyecto nos basaremos en el circuito siguiente:
{kind=link}
NOTA
Aunque en el esquema está representado el chip L239B, puedes utilizar el chip SN754410, más potente y económico.
En este circuito vemos que con sólo 2 pines de control (D1 y D2) controlamos las 4 bobinas del motor paso a paso (L1,L2,L3 y L4). Esto lo podemos hacer ya que para mover un motor paso a paso debemos alimentar las bobinas en el orden siguiente:

En esta tabla vemos que los valores del devanado 2 es el invertido del 1 y que los del devanado 4 son los invertidos del 3, por lo que si invertimos la señal del L1 obtenemos la señal de control necesaria para L2 y de la misma manera si invertimos la señal de L3 obtendremos la señal de control de L4, con lo que la tabla para poder mover el motor quedaría de la forma siguiente:

Esta inversión de señal la realizamos en el circuito utilizando 2 transistores Q1 y Q2, que cuando estan activos (señal IN1 o IN4) derivan a masa las entradas IN2 o IN3 que están a positivo con las resistencia Pull-Up R1 y R3.
Si utilizas Arduino, no es necesario que envies manualmente los pulsos a cada bobina del motor, tienes la vida un poco más fácil, ya que dispone de la librería Stepper, que simplifica este proceso. (Tienes más información en la sección de enlaces).
NOTA: Ten en cuenta que este este circuito necesita dos señales D1 y D2, que deben activarse según la tabla anterior (o la librería Stepper en Arduino).
ESTE CIRCUITO NO FUNCIONA CON SEÑALES PASO y DIRECCIÓN.
Componentes
2 resistencias de 1K (~0,02x2=0,04€)
2 resistencias de 10K (~0,02x2=0,04€)
1 Zócalo de 16 patillas (0,3€)
2 Transistores BC547-B (~0,2€)
1 CI L293D (2,7€) ó SN754410 (1,66€)
un trozo de placa de 11 filas por 14 agujeros. (0,8€)
Cables de colores (0,5€)
3 regletas CI de paso 2,54 (0,4x3=1,2€)
(En la entrada puedes soldar directamente los cables, y en la salida utilizar una regleta típica de electricista)
2 resistencias de 10K (~0,02x2=0,04€)
1 Zócalo de 16 patillas (0,3€)
2 Transistores BC547-B (~0,2€)
1 CI L293D (2,7€) ó SN754410 (1,66€)
un trozo de placa de 11 filas por 14 agujeros. (0,8€)
Cables de colores (0,5€)
3 regletas CI de paso 2,54 (0,4x3=1,2€)
(En la entrada puedes soldar directamente los cables, y en la salida utilizar una regleta típica de electricista)
El coste total aproximado es de unos 5,5€ (con el L293D) ó 4,5€ (con el SN754410)
NOTA
Precios orientativos y aproximados para que sepas si hablamos de millones de dolares o de céntimos de euro, sin IVA y suministrados por Biltron - 2011
(No tengo nada que ver con Biltron, pero como son muy majos, les hago publicidad).
Realización
El método Paper consiste en ayudarnos en unas pegatinas para facilitarnos el proceso de montaje y soldadura.
Primero imprimiremos el documento PaperStepper(L293D) (disponible en la parte inferior de esta página en el apartado de descargas):

Una vez impreso el documento, comprobaremos que la impresión se ha realizado a la escala correcta con la ayuda de la regla impresa situada en el lateral izquierdo de la hoja. Al colocar a su lado un regla en centímetros deberán coincidir las marcas.
{kind=link}

Si quieres puedes proteger la paperetiqueta con un plástico transparente autoadhesivo:

{kind=link}
{kind=link}
Después recortamos la Paperetiqueta:

{kind=link}

{kind=link}
Necesitaremos cortar un trozo de placa de stripboard de 11 filas por 14 agujeros, lo podemos hacer con un cutter.
Primero marcamos la zona a cortar


por ambos lados

NOTA
Si en vez de cortar una línea recta quieres cortar una esquina (como ves en la parte superior derecha de la imagen anterior), deberás marcar con el cutter bastante por los dos lados.
Alineamos la línea a cortar con el canto de una superficie dura (borde de mesa)

y apretamos suvemente.

Y con una lija conseguimos unos cantos lisos:

{kind=link}
{kind=link}

NOTA
en la foto ves que he cortado la paperetiqueta un poco más grande que lo indicado para poder ajustarla a la placa una vez encolada y corregir el descentramiento de los agujeros de la placa.{kind=link}
Ahora aplicaremos adhesivo a la paperetiqueta (suelo utilizar cinta de doble cara)

{kind=link}
deberemos colocar la etiqueta sobre la placa. Para que coincidan los agujeros dibujados en la etiqueta con los agujeros de la placa, utilizo una aguja como guía.

{kind=link}
Con una aguja gruesa taladramos todos los agujeros de la paperetiqueta

{kind=link}
Podemos comprobar al transluz que hemos taladrado todos los agujeros.

{kind=link}
Soldamos los pines, zócalos, puentes y resistencias.
Deberemos prestar atención a los puentes (sobre todo a los que están debajo del zócalo).
El único componente con polaridad es el circuito integrado y los transistores, así que comprobaremos que el zócalo tiene la zona con marca en la parte superior (como lo indica la paper-etiqueta).
{kind=link}
Si no quieres utilizar bornas para soldar en circuito impreso, puedes utilizar una clema de electricista (más baratas y fáciles de conseguir).
{kind=link}
Una vez soldados todos los componentes, y fijándote en la imagen del documento impreso (lado pistas) puedes cortar con un taladrín y una fresa fina las pistas indicadas (yo hago este paso una vez soldados todos los elementos para poder tomar como referencia las patillas soldadas):

{kind=link}
{kind=link}

{kind=link}
Y el resultado es ...

{kind=link}
{kind=link}
Funcionamiento
Si no has descargado y descomprimido el archivo PaperStepperXX.zip, ha llegado el momento de hacerlo. Lo tienes disponible en el enlace inferior.
Deberás compilar e instalar en el Arduino (o Paperduino) el programa de ejemplo realizado por Tom Igoe que tienes disponible en el archivo de descargas (/Sketches/PaperStepper2w.pde).
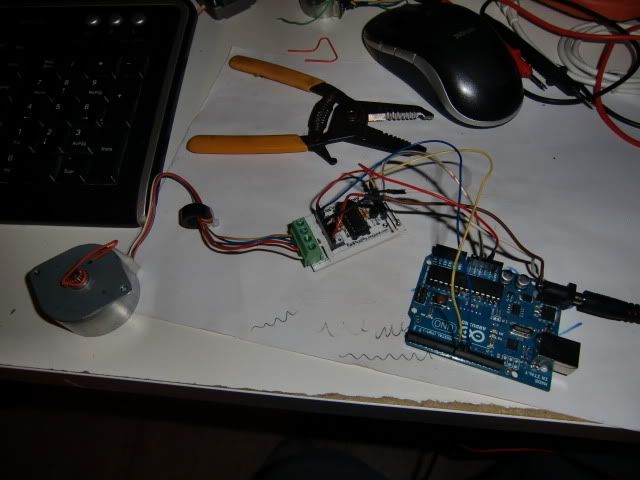
Deberás realizar el siguiente montaje:

NOTA
En mi caso como el motor es de 12v, utilizo una vieja fuente de alimentación de un PC para el motor y el Arduino se alimenta a través de USB.
Otra posibilidad es alimentar el Arduino y el motor paso a paso con la fuente de Alimentación.

{kind=link}

El programa simplemente da un número de vueltas en un sentido, y en otro indefinidamente.
Debes modificar el valor de la linea:
#define motorSteps PASOSVUELTA, donde PASOSVUELTA indica el número de pasos que hay que suministrar al motor para que el eje de una vuelta completa.
En mi caso al utilizar un motor de paso 3,75grados => 360/3,75=96.
También puede ser necesario que reduzcas la velocidad del motor si éste tiene mucha inercia, reduciendo el valor de VELOCIDAD de la linea: myStepper.setSpeed(VELOCIDAD)
/*
Stepper Motor Controller
language: Wiring/Arduino
This program drives a unipolar or bipolar stepper motor.
The motor is attached to digital pins 8 and 9 of the Arduino.
The motor moves 100 steps in one direction, then 100 in the other.
Created 11 Mar. 2007
Modified 7 Apr. 2007
by Tom Igoe
*/
// define the pins that the motor is attached to. You can use
// any digital I/O pins.
#include <Stepper.h>
#define motorSteps 96 // (360/3,75)change this depending on the number of steps
// per revolution of your motor
#define motorPin1 8
#define motorPin2 9
#define ledPin 13
// initialize of the Stepper library:
Stepper myStepper(motorSteps, motorPin1,motorPin2);
void setup() {
// set the motor speed at 60 RPMS:
myStepper.setSpeed(50);
// Initialize the Serial port:
Serial.begin(9600);
// set up the LED pin:
pinMode(ledPin, OUTPUT);
// blink the LED:
blink(3);
}
void loop() {
// Step forward 100 steps:
Serial.println("Forward");
myStepper.step(96);
delay(500);
// Step backward 100 steps:
Serial.println("Backward");
myStepper.step(-96);
delay(500);
}
// Blink the reset LED:
void blink(int howManyTimes) {
int i;
for (i=0; i< howManyTimes; i++) {
digitalWrite(ledPin, HIGH);
delay(200);
digitalWrite(ledPin, LOW);
delay(200);
}
}
Stepper Motor Controller
language: Wiring/Arduino
This program drives a unipolar or bipolar stepper motor.
The motor is attached to digital pins 8 and 9 of the Arduino.
The motor moves 100 steps in one direction, then 100 in the other.
Created 11 Mar. 2007
Modified 7 Apr. 2007
by Tom Igoe
*/
// define the pins that the motor is attached to. You can use
// any digital I/O pins.
#include <Stepper.h>
#define motorSteps 96 // (360/3,75)change this depending on the number of steps
// per revolution of your motor
#define motorPin1 8
#define motorPin2 9
#define ledPin 13
// initialize of the Stepper library:
Stepper myStepper(motorSteps, motorPin1,motorPin2);
void setup() {
// set the motor speed at 60 RPMS:
myStepper.setSpeed(50);
// Initialize the Serial port:
Serial.begin(9600);
// set up the LED pin:
pinMode(ledPin, OUTPUT);
// blink the LED:
blink(3);
}
void loop() {
// Step forward 100 steps:
Serial.println("Forward");
myStepper.step(96);
delay(500);
// Step backward 100 steps:
Serial.println("Backward");
myStepper.step(-96);
delay(500);
}
// Blink the reset LED:
void blink(int howManyTimes) {
int i;
for (i=0; i< howManyTimes; i++) {
digitalWrite(ledPin, HIGH);
delay(200);
digitalWrite(ledPin, LOW);
delay(200);
}
}
Y el resultado con un motor bipolar es el siguiente:
El mismo programa y circuito con un motor unipolar (al no conectar los cables comunes lo convertimos en motor bipolar):
Si quieres, dispones de más ejemplos que funcionan con este circuito, desde el propio entorno Arduino:

NOTA:
Estos ejemplos están pensados para utilizar 4 pines de Arduino, para poder usarlos, simplemente modifica la linea siguiente, utilizando sólo los pines 8 y 9.:
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8,9,10,11);
Stepper myStepper(stepsPerRevolution, 8,9,10,11);
// initialize the stepper library on pins 8 and 9:
Stepper myStepper(stepsPerRevolution, 8,9);
Stepper myStepper(stepsPerRevolution, 8,9);
Enlaces de Interés
- PaperStepperUnipolar
- PaperStepperChino: Adaptador para usar un driver Standar (chino) en TxapuCNC.
- http://www.todorobot.com.ar/informacion/tutorial%20stepper/stepper-tutorial.htm
- http://arduino.cc/en/Reference/Stepper?from=Tutorial.Steppe
- http://arduino.cc/en/Reference/StepperBipolarCircuit
- http://www.tigoe.net/pcomp/code/circuits/motors/stepper-motors
- http://www.x-robotics.com/motorizacion.htm#MOTORES%20PaP
Galería
Mauricio nos muestra estas fotos: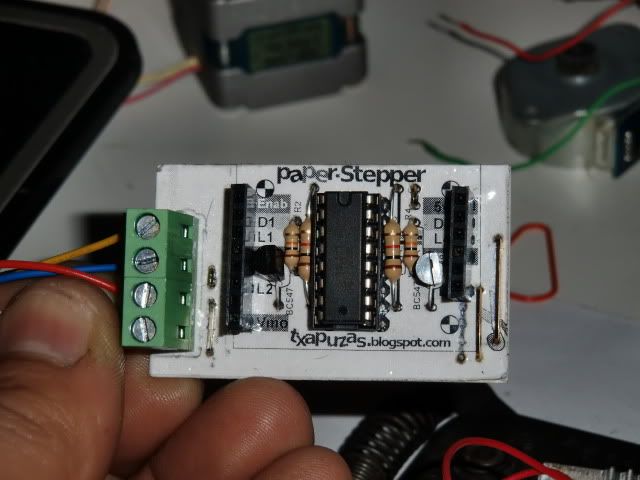
Información legal
1. Propiedad intelectual
Todos los derechos de propiedad intelectual del contenido de Txapuzas eléctronicas, están bajo una licencia Creative Commons Share-Alike, cuyo contenido podéis revisar en este enlace.
Por tanto queda permitido copiar, distribuir, comunicar públicamente la obra y hacer obras derivadas de la misma, siempre que se respeten los términos de la licencia arriba reseñada.
3. Actualizaciones y modificaciones de Txapuzas electrónicas
El autor se reserva el derecho a actualizar, modificar o eliminar la información contenida en Txapuzas eléctrónicas, y la configuración o presentación del mismo, en cualquier momento, sin previo aviso, y sin asumir responsabilidad alguna por ello.
4. Indicaciones sobre aspectos técnicos
El autor no asume ninguna responsabilidad que se pueda derivar de problemas técnicos o fallos en los equipos informáticos, que se produzcan a causa de los circuitos e ideas expuestos en el blog de txapuzas electrónicas, así como de los daños que pudieran ocasionar.
El autor se exime de toda responsabilidad ante posibles daños o perjuicios que pueda sufrir el usuario a consecuencia de errores, defectos u omisiones en la información facilitada.
Descargas
El esquema, descripción e imágenes están disponibles en el siguiente enlace:

Notas
Para la realización de este proyecto se han utilizado los programas: Arduino, Inkscape, Openoffice, Gimp, Picasa, Fritzing
Si encuentras algún fallo, se te ocurre alguna mejora, o simplemente quieres hacer algún comentario, te lo agradeceré: Gracias. :-)
Hola Iñigo!, incursionare en las lides de armar un circuito precisamente con este!
ResponderEliminarMuchisimas gracias por tomarte la tarea de hacerlo, y colgarlo desinteresadamente, facilitas enormemente la vida a quienes no tenemos idea pero en este caso..queremos mover un motor.
PD En Murcia solo consegui el L293 NE ..espero que funcione igual, parece entregar mas potencia pero tiene un rango de temperaturas mas limitado. Gracias de nuevo!
Hola Anónimo.
ResponderEliminarGracias por tu comentario.
Sólo comentarte que si utilizas el L293 en vez del L293D, debes tener cuidado, ya que éste último incorpora diodos de "Clamping" para evitar las corrientes generadas por las bobinas del motor. El L293 no tiene éstos diodos, y si tu motor realiza mucho esfuerzo puede dañar el integrado si no los incorporas en tu circuito.
Saludos
HOLA AMIGO QUIERO ME GUSTARIA HACER UNA ALCANCIA, EN DONDE CON UN MOTOR VAYA GIRANDO UN PELUCHE MIENTRAS SE ESCUCHA UN FRAGMENTO DE UNA CANCION Y Q AL DAR LA VUELTA COMPLETA SE APAGUE Y AL METER UNA MONEDA SE VUELVA ACTIVAR Y LO CONECTE A LA LUZ DE CASA..ES POSIBLE HACERLO?? SALUDOS EN DONDE LO PODRIA HACER O COMO ES PARA UN REGALO DE MI ESPOSA...TE AGRADECERIA MUCHO, AH EL PELUCHE NO TE DIJE PERO SERE YO EN TELA JAJAJA....
EliminarMuchisimas gracias Iñigo y por contestar tan rapido(mi nombre es Mauricio, me registre como seguidor ;), no se si lo hice correctamente), pues entonces debere recorrer un poco mas a ver si consigo el 293d, (el de la tienda me dijo que era lo mismo y que lo de las letras N, NE, D, correspondia al fabricante....se ve que mucho no sabia.
ResponderEliminarYa corte la placa, pegue la etiqueta e hice los agujeritos,,,,ahora a soldar!.
Supongo que como en el driver con el 298n , no hay pin de paso y de dir, sino que s ehace con software, no? O sea que podre modificar la cantidad d evueltas y velocidad en una y otra direccion?...o la velocidad es obliugatoriamente la misma en ambas direcciones?
Muchas gracias , perdona el rollo y Feliz 2011!!!!!
Hola Mauricio
ResponderEliminarSi quieres (y si utilizas un zócalo), puedes probar el 293 con un motor paso a paso pequeño, (aunque no esté pensado para cargas inductivas) para comprobar el funcionamiento. (yo probé durante bastante tiempo el L298N , que tampoco tiene diodos y no tuve problemas).
Si no lo vas a utilizar en otro proyecto, lo peor que te puede pasar es que se queme. :-P
Puedes mirar las características en el Datasheet del fabricante.
Todos los PaperStepper son un poco "primitivos", y en vez de utilizar un chip que convierta las señales de PULSO y DIRECCION en pasos para el motor, utilizan el Arduino (Para eso lo tenemos no?).
Si utilizas la librería Stepper (como en el ejemplo) será así:
La velocidad: myStepper.setSpeed(VELOCIDAD)
La cantidad de vueltas: myStepper.setSpeed(+-PASOS)
(Deberás calcular cuantos PASOS son necesarios en tu motor para dar una vuelta.)
El sentido: El signo de PASOS
En cualquier momento puedes variar estas variables y el motor se moverá consecuentemente.
Tienes información de la librería en:
http://arduino.cc/estemp/Reference/Stepper
Y un ejemplo de su uso moviendo el motor con un potenciómetro en:
http://arduino.cc/es/Tutorial/MotorKnob
Muchas de nadas y Feliz 2011 !!
Hola!!!.. feliz 2011 , de nuevo gracias!!!
ResponderEliminarHe hecho lo d eusar el l293ne y bueno..ha funcionado...eso si...no se si e spor el porgrama, o por la falta de diodos en el Integrado, etc. Funciona unos segundos en un sentido y despues empieza a hacer un "scracht" como un DJ , XD.
Pero funciona!!!!! Estoy contentisimo!
Aqui te mando unas foticos de tu driver (solo le hice un agregado...use una placa un poco mas grande y mediante puentes, hice que L1, 2, 3 ,y 4,estuviesen juntos en las clemas soldadas a la placa. Mas que nada porque tenia la clemas.
http://i193.photobucket.com/albums/z27/mauriciogiandinoto/paperstepper/CIMG1548.jpg
http://i193.photobucket.com/albums/z27/mauriciogiandinoto/paperstepper/CIMG1547.jpg
http://s193.photobucket.com/albums/z27/mauriciogiandinoto/paperstepper/?action=view¤t=CIMG1546.mp4
Un abrazo!!!!
Enhorabuena Mauricio!!
ResponderEliminarVeo que has empezado con ganas el año ;-)
He visto tu video y el movimiento del motor. Parece que al cabo de un tiempo el motor pierde el sincronismo de algunos pasos.
Esto puede ser porque la velocidad sea muy alta para ese motor (prueba a bajarla), o que la fuente que utilizas no tenga potencia suficiente (esto último no lo creo, ya que al utilizar una fuente única se resetearía el Arduino)
¿Que sketch has cargado en el Arduino?
¿Sucede lo mismo con otros skeches (Arduino/Files/Examples/Stepper/...)?
¿y con otros motores?
Bueno, saludos. Ya me contarás...
Hola de nuevo Mauricio.
ResponderEliminarPerdona, pero mirando de nuevo las fotos que has enviado, se me ha ocurrido una idea.
(A mi ya me ha pasado más de una vez)
Al poner las clemas has cortado las pistas para aislar las clemas de las señales del circuito ¿Verdad?.
(entre los puentes y la tira de pines hembra)
Saludos y gracias por las fotos
Hola Iñigo, gracias por el interes!!...si empece el año soldando componentes, jeje.
ResponderEliminar(y tu teniendo que soportarme..te compadezco ;)
Si que corte las pistas que dices, lo atribuyo yo a que no es el integrado correcto....solo el D de la flia de los l293 lleva esos diodos(vi las hojas de datasheet).
En cuanto a los sketch use el de motor Knob de la libreria de arduino modificando la linea de asignacion de salidas( dejando solo la 8 y 9), intente cargar el programa que pones tu en la pagina y al darle a Verify me dio un error.
Como d eprogramar tampoco tengo idea.....
Lo mio es la astronomia....y uso en la medida de lo que voy comprendiendo la electronica para esos menesteres, lo d emover el motor pap es para hacer un sistema de sguimiento y contrarrestar la rotacion terrstre. Use un motor peque en la prueba del video...y una fuente de bateria de 12v bien cargada...por comida no ha sido el baile que le ha entrado al motor. Usare tambien para comprobar alguna resistencia bobinada ewn la entrada de Vmo, por si el driver sobrexcita al motor y hay algun retorno o Kicknoseque.. o algo que afecta al l293, evidentemente es algo de eso.
Un saludo!!!!!!!
Yo de nuevo.....acabo de poner el sketch de esta pagina
ResponderEliminarhttp://www.tigoe.net/pcomp/code/circuits/motors/stepper-motors
el que pone para arduino,y va todo como la seda....cosas de la vida!! (alguna razon habra pero no alcanzo a saber cual), eso si el motor se calienta un poco y el integrado tambien, asi que le limitare algo el consumo con la resistencia ( ese truquillo me lo dijo un amigo que hace electronica tambien) Saludos!!!
Enhorabuena!!
ResponderEliminarPerdón por el problema del Sketch, es el original de Tom Igoe, (de hecho ni siquiera lo he traducido).
Ya lo miraré con cuidado.
Con respecto a los motores paso a paso, son grandes consumidores de corriente, y es normal que se calienten (en algunos pone una pegatina de peligro no tocar "Hot Surface"). Puedes limitar la corriente, pero el motor tendrá menos potencia (menos chichas). Si limitas el consumo con una resistencia lo que haces es que se produzca una caida de tensión en la resistencia, y por lo tanto alimentes con menos tensión al motor. Para eso puedes alimentarlo con una batería más pequeña (de menos tensión). Te comento todo este rollo, ya que si vas a realizar algún sistema portátil no es muy conveniente desperdiciar la potencia de la batería calentando una resistencia.
Por último, si vas a automatizar un telescopio, como el motor no va a estar moviéndose constantemente, tal vez sea más interesante utilizar la patilla enable (si la pones a masa deja de alimentar al motor y éste se mantiene en posición por sus imanes internos) y sólo activar las bobinas (enable a positivo) cuando tengas que moverlo así se calentará menos y consumirá menos batería.
Bueno, lo dicho: Enhorabuena y saludos
Hola a todos,
ResponderEliminarEnhorabuena por un blog tan útil e interesante.
Mi pregunta es la siguiente. Quiero hacer una aplicación para controlar dos motores bipolares (uno para azimut y otro para elevación), pero la información de los movimientos los quiero pasar a través de un interfaz de usuario realizado en C++. ¿Es posible?
Espero haberme explicado bien, si no disculpadme y preguntadme todo lo que necesiteis.
Muchas gracias de antemano
Hola anónimo:
ResponderEliminarSi utilizas Arduino, puedes conectarte con él a través del puerto serie y enviarle las órdenes necesarias para que mueva los motores paso a paso como quieras.
Un ejemplo de este funcionamiento lo tienes en:
http://txapuzas.blogspot.com/2009/12/txapu-cnc-software.html. (está realizado en gambas-linux)
Saludos
Muchas gracias Iñigo por tu rápida respuesta. Mi nombre es Antonio.
ResponderEliminarQuisiera hacerte algunas preguntas más (seguro que no son las últimas):
1) ¿Puedo controlar los dos motores con una única placa arduino o necesito una placa para cada motor?
2) ¿Necesito un driver para cada motor?
3) Mi ordenador no tiene puerto serie, ¿puedo enviarle las ordenes a través de USB)
Espero que no sean preguntas demasiado tontas, pero es que soy nuevo en esta tecnología y aún no sé que puedo y qué no puedo hacer.
Muchas gracias
Hola Antonio:
ResponderEliminar1) Con una placa Arduino puedes controlar hasta 9 motores (si usas drivers de dos hilos 19/2=9).
2) Si
3) El Arduino tiene un conversor USB_SerieTTL,(con el paperduino tienes que utilizar un cable que posea el chip conversor ), de forma que crea un puerto serie virtual, con el que puedes conectarte.
quizás te interese hechar un vistazo a:
http://arduino.cc/es/Guide/HomePage
http://arduino.cc/es/Guide/HomePage
Buenas iñigo.
ResponderEliminarAntes de nada felicitarte, tu blog esta muy "currao", y es muy interesante.
Estoy tentado de hacerme tu modelo CNC con todos los paper que tienes publicados, el problema me viene en que no tengo mucha idea de electronica (queria iniciarme con este proyecto) y veo muchos nombres que no encuentro en la pagina de Biltron. ¿Hay alguna "traduccion" de referencias?¿Todo se puede comprar en esa pagina?
Muchas gracias y un saludo
Hola Jose
ResponderEliminarCreo que la página de biltron está en obras desde hace años, la verdad es que no se si se les puede comprar por internet. Yo los compro directamente.
Pero los componentes se pueden conseguir fácilmente en cualquier tienda de componentes electrónicos.
Saludos
hola iñigo!
ResponderEliminaryo tambien sigo tus pasos con el stepperpaper, una pregunta, creo q es problema de la libreria pero no se solucionar el error, me dice :
sketch_apr07a.cpp: In function 'void loop()':
sketch_apr07a:45: error: 'myStepper' was not declared in this scope
es por¿?
Gracias
Hola JoJordi
ResponderEliminarAparentemente te falta declarar e inicializar la librería antes de usarla al principio del programa la librería stepper:
//Tienes que declararla
#include
// E inicializarla:
Stepper myStepper(motorSteps, motorPin1,motorPin2);
¿Esto te pasa con los ejemplos del Arduino-IDE ( Menú/File/Examples/Stepper) ?
NOTA:
Sin otra información no te puedo contestar con más precisión.
Saludos
Hola JoJordi, por un defecto de Blogger, no se ven los símbolos de "mayor que" y "menor que", por lo que include está mal:
ResponderEliminar#include "menorque" Stepper.h "mayorque"
tienes un ejemplo en:
http://arduino.cc/es/Tutorial/MotorKnob
hola iñigo eres un maquina
ResponderEliminarpos la verdad es q copio i pego el codigo escrito arriba.
i mientras t escribia lo arreglao pareze que eran los espacios entre el Server.h i los simbolos que me dezias.... cierto ?
Muchas gracias por tus guias son de mucha utilidad para mi, no descarto una donación viaPayPal, mas adelante.
Muchissimas gracias!!!
Hola! me llamo michael, soy de méxico y quisiera saber si me podrías ayudar: yo estoy haciendo un seguidor de línea, para esto necesito manipular el eje delantero de mi carrito, pero no logro hacerlo bien uso un motor DC y el driver de potencia L293D la señal que se debe emitir al driver es de dos sensores CNY70 para que en la salida (pines 3 y 6) el motor pueda girar a una u otra dirección. aveces lo hace aveces no, quiero pensar que es por la carga mecánica del eje (hacerlo girar) cuando no tiene carga mecánica gira perfectamente... aún así no logro decifrar con exactitud qué puede ser... Con respecto a tu blog: Pff es muy bueno, lamentablemente no es lo que exactamente busco, pero las ideas las voy hilando con información como la que expones... UN SALUDO Y GRACIAS:)
ResponderEliminarHola Michael
ResponderEliminarLo único que te puedo decir, es que parece que tienes razón, yo intentaría alimentar el motor con una fuente de alimentación de más potencia, ya que cuanto más par (torque) se le exige al motor, más consume.
Ok, sí lógicamente hay que aplicar más corriente para obtener mejor fuerza en el par la cosa es que la alimentación se hace de los 5v que se le suministra a todo el circuito (Sensores y driver) entonces el motor se alimenta de 5v según yo que se obtiene en la salidas (pines 3 y 6) como ya te había comentado... en algunas hojas de datos veo que el C.I. puede soportar en una mitad (Del pin 1 hasta el 9) 5v, y de la otra mitad de 4,5v hasta 36v y 1.2A pero bueno lamentablemente no logro interpretar como sería mi conexión si ocupo la otra parte del C.I. en fin... MUCHAS GRACIAS AMIGO, SUERTE :)
ResponderEliminarHola michael.
ResponderEliminarEl L293D necesita 5v para la parte de control en las patillas: 1,2,7,9,10 y 15 (fíjate en el esquema del paperStepper) , pero puede soportar mucha más tensión en la parte de portencia Patillas: 3,6,11,14.
La tensión positiva de la parte de control (5v) se suministra por la patilla 16, y la de potencia por la patilla 8. La masa de la tensión de control y la de potencia es común.
Si tu motor es de 5v, y la fuente de alimentación es potente, puedes poner las patillas 16 y 8 a 5v.(entonces el problema es que tu fuente no suministra la intensidad suficiente).
Si tu motor necesita más tensión, tienes que diferenciarlas, en la patilla 16 siempre 5v, y en la 8 el polo positivo de la Fuente de Alimentación con la tensión de tu motor. El negativo de las dos fuentes hay que unirlos.
Si te fijas, mover un motor DC es lo mismo que alimentar una bobina de un motor paso a paso (El esquema del paperStepper te puede orientar; en tu caso alimentando las bobinas L1-L2)
Espero haberte ayudado
Hola Iñigo.
ResponderEliminarUna simple fe de errata mientras monto este Paper-Stepper ;-). Cuando indicas los pasos para cortar la placa, indicas que hay que utilizar "10 filas por 11 agujeros" cuando en la etiqueta indicas que son "11 filas por 14 agujeros", estaba marcando para corta, cuando se me ha ocurrido imprimir la etiqueta para presentarla en la placa y me he dado cuenta.
Un saludo,
Ángel
Hola Angel Andrés
ResponderEliminarPerdona por el error, ya está corregido. Gracias por decirlo.
De nada, gracias a ti por documentar tan bien los proyector, así da ganas de hacerlos ;-)
ResponderEliminarHola Iñigo.
ResponderEliminarHe tenido un problema parecido al indicado por Jojordi, pero tranquilo, le he dado solución.
Expongo los datos para que el resto de lectores no tropiecen con la misma "piedra" que yo, por falta de costumbre en la utilización de editores de código.
Realizando los pasos de carga Software en el Arduino, me he encontrado con el siguiente error al comprobar el código pegado:
Versión herramienta software Arduino: 0022
Modelo Arduino: Mega2560
Ordenador: iMAC
S.O: Leopart
Error al pegar el programa:
sketch_may29b.cpp:19:22: error: stepper.h: No such file or directory
sketch_may29b:27: error: 'Stepper' does not name a type
sketch_may29b.cpp: In function 'void setup()':
sketch_may29b:31: error: 'myStepper' was not declared in this scope
sketch_may29b.cpp: In function 'void loop()':
sketch_may29b:45: error: 'myStepper' was not declared in this scope
sketch_may29b.cpp: At global scope:
sketch_may29b:67: error: 'Y' does not name a type
Problema:
En la declaración de la librería Stepper.h, el lenguaje no detecta los caracteres "stepper.h" como librería he indica que no existe la librería, al seguir en color negro. Debería mostrarse en color naranja.
Solución:
El nombre de las librería tienen que escribirse literalmente, los editores de código, por regla general detectan palabras claves, pintándolas de diferente color para ayudar a leer el código.
En este caso el entorno de desarrollo de Arduino es sensibles a las mayúsculas y minúsculas. Por tanto, la letra "s" del nombre tiene que ser escrito en mayúsculas "Stepper.h"
Después de cambiar la "s" por una "S", el nombre, sin la extensión, se pinta en color diferente, desapareciendo los errores al comprobar el código nuevamente.
Ahora me toca cablear el motor y la fuente de alimentación para una prueba final ;-)
Un saludo,
Ángel Lerena.
Hola de nuevo Iñigo.
ResponderEliminarReferente al tema de la "s" y "S", hay que decir que solo esta mal en el código pegado en la página Web. Si utilizamos el fichero con extensión "pde" que nos has preparado en la descarga, esta perfecto.
Hola Angel Andrés
ResponderEliminarPerdona por el error en la llamada de la rutina Stepper.
Tuve problemas con el applet Java que hace de editor, ya que transformaba los símbolos > y <, al considerarlos como una etiqueta HTML, y no se mostraba correctamente, Después de probar varias cosas lo conseguí, pero en el camino por error pasó la "S" a "s".
Ya lo he corregido.
Gracias por las molestia y dedicación en la descripción tan detallada del error.
Saludos
De nada Iñigo, gracias a ti.
ResponderEliminarNunca me han gustado esas frases de la gente que pide ayuda y dice "no funciona" y ya esta, como si estuvieran escribiendo un SMS y le cobraran por las palabras ;-)
Mi filosofía es "Si uno quiere ayuda, tiene que esforzarse en dar toda la información posible, aunque hayas hecho algo mal, di que pasos as seguido si quieres realmente que te ayuden".
Hola Angel Andrés:
ResponderEliminarMe encanta encontrar personas que pertenezcan a mi "escuela filosófica". ¿Me has leído el pensamiento? :-)
NOTA: Me parece que voy a poner tu máxima al inicio de la zona de mensajes de la página.
Saludos
hola acabo de comenzar con esto de arduino ya he hecho varios programitas como un espectaculo de luces de led osea k no soy nuevo del todo, pero hace un par de dias tuve un problema q me lleva de cabeza el ordenador no me reconoce el arduino y en tools serial port me sale grisaceo, es decir, no puedo entrar en el pero si en board alguien me puede decir como solucionar esto gracias
ResponderEliminarHola Anónimo
ResponderEliminarCreo que deberías consultarlo en:
http://arduino.cc/forum/index.php/board,32.0.html
Especificando Sistema Operativo, Versión de Arduino...
Hola! soy Patricia desde Cordoba - Argentina y necesito tu ayuda!! estoy por armar esta cnc y mi problema son los motores paso a paso, tengo dos EM-243 STH-39H112-01 de 4 cables y uno EM-181 17PM-H005-P2V de 5 cables, de los que no tengo ni idea cuantos pasos tienen... tendras info sobre estos motorcitos?? otra alternativa es comprar estos motores http://articulo.mercadolibre.com.ar/MLA-117025150-motores-paso-a-paso-para-cnc-o-automatizacion-_JM son de 200 pasos (1.8 grados) sirven para esta cnc?? que area de trabajo seria la recomendada?
ResponderEliminarEspero puedas ayudarme!!!
Muchas gracias! EXCELENTE PAGINA!
Hola Patricia
ResponderEliminarPara TxapuCNC puedes utilizar cualquier motor paso a Paso (Modificando los valores de _init en el sketch TxapuCNC_RX).
Lo siento no tengo información sobre estos motores, pero creo que puedes averiguar el número de pasos por vuelta (si no lo encuentras googleando) mediante el método "prueba-error": Si cargas en el Arduino el sketch de ejemplo "Stepper" y le mandas dar varias veces una cantidad de pasos que creas que es una vuelta. (200 pasos, 100, ...) hasta que veas que la posición final del eje del motor es la misma que la de inicio.
Si utilizas el diseño de la "mantis", el area de trabajo es de ~DIN A5.
Saludos
buenas soy Christian, queria hacerte una consulta. el tema es el siguiente, ninguno de los motores que tengo gira, pero se siente la resistencia del motor al intentar girarlo manualmente, que puedo estar haciendo mal?
ResponderEliminarse agradece la ayuda
saludos
otra vez yo (Christian)
ResponderEliminarlogre hacer girar uno de los muchos que tengo aunque se calienta demasiado, estoy usando un L293D y la alimentación la hago por medio de una fuente de pc.
se agradece cualquier ayuda
Hola Christian
ResponderEliminarSi se calientan de masiado los motores, puedes hacer dos cosas:
- Poner un refrigerador al L298N
- Alimentar al motor con una tensión más baja.
Saludos
hola de nuevo (Christian)
ResponderEliminarOk muchas gracias lo voy a tener en cuenta.
ahora no puedo hacer andar estos EM-401, EM-402, y EM-434 son motores que saque de unas impresoras epson. con estos el problema es el que plantie al principio, hacen ruido, oponen resistencia a ser girados manualmente, pero no giran. probé cambiando la cantidad de pasos y velocidad del motor, pero no pasa nada.
muchas gracias otra vez
ya me dejo de molestar perdon por el spam, ya solucione el tema de los motores muchas gracias por todo muy buena la pag, una cosa mas, vi que corregiste el error del codigo aun asi cometiste un pequeño error, es #include y no #include < Stepper.h > el espacio entre los < > y la palabra, no los reconoce como validos.
ResponderEliminarSaludos!
Hola, soy Christian otra vez, quería hacerte una consulta sobre el calentamiento excesivo que sufren los L293N, al conectarse con la fuente de alimentación (12v). hay alguna solución de tipo electrónica para esto? o solo comprar un disipador y coolers para que no caliente tanto.
ResponderEliminarotra pregunta es si se puede cambiar el tipo de driver por otro que trabaje con frecuencias mayores, la verdad es que no se nada de electrónica y voy aprendiendo a los golpes. se agradece toda la informacion que puedas brindar.
Saludos y feliz año
Hola Christian
ResponderEliminarPuedes soldar dos chips, uno encima del otro (yo no lo he hecho con el L293, con el ULN2003 funciona perfectamente, con el L293 debería funcionar) para doblar la intensidad de funcionamiento.
Ejemplo: http://www.flickr.com/photos/ieeej/4378510296/
Además nunca está de más ponerle un buen disipador.
El paperStepper, siempre está alimentando al motor aunque éste esté parado, por lo que se calentará aunque no uses el motor, para que el chip no se caliente en exceso, puedes desactivar el motor (para que no consuma nada) cuando no lo estés moviendo, poniendo a GND la patilla de Enable.
Con respecto a la velocidad del motor, viene definida fundamentalmente por la inercia del motor y componentes asociados (hay que probarlo experimentalmente).
El Arduino (y el paperStepper) puede suministrar señales a mucha más velocidad que la soportada por el motor.
Si haces un programa con rampa de aceleración y frenado, puedes aumentar considerablemente la velocidad de funcionamiento sin que el motor pierda pasos.
Hola Iñigo, la verdad es que no me canso de mirar tu blog, te cuento que soy CARPINTERO y de electronica no se ni pipa pero lo dejas tan facil todo que me animey ahora tengo un lio en la cabeza que me va a estallar!!!.
ResponderEliminarTe cuento que hice una plaquita integrando los tres ejes XYZ para no puentear con cables y voy a hacer lo mismo con un dimer y una controladora de extrusora y algo para controlar un laser o lo que sea, poner todo en tres modulos, controladora arduino o paper, paperstepper, y controladoras de cabezales. Todo en una sola caja cerrada con sus conexiones externas por fichas.
Si logro hacer esto estaria feliz como una lombriz.
Gracias por tu gran aporte y no me atrevo a publicar los avances porque prefiero probarlo primero y dejarlo terminado y asi no lleno de contenido inutil la red.gracias maestro!!!!
que transistores usaste para q1 y q2?
ResponderEliminarMuy bueno el tutorial, gracias
acabo de ver en el zip que los q1 y q2 son BC547
ResponderEliminarmuchas gracias
Hola Iñigo. Quería consultarte si el paperstepper sustituye al Easydriver. Espero que la pregunta no parezca muy estúpida pero estoy empezando en esto del arduino y tengo dos l293 que quisiera aprovechar.
ResponderEliminarUn saludo
hola Iñigo, he realizado los paperstepper L293 y me he comprado unos motores bipolares de 12v 1,8º caracteristicas del motor, en el programa tienes 360º el tuyo es de 3,75º son 96 pasos, el mio seria 360º/1,8º serian 200 pasos, el programa de demostracion lo que hace es dar una vuelta a un lado y una vuelta a otro lado a la vez que se desplaza, ¿como puedo dar una vuelta completa para ver si realmente da los 200 pasos en 360º? muchas gracias saludos
ResponderEliminarHola Tomas,
EliminarEl programa es un ejemplo de Tom Igoe.
Si quieres que gire una vuelta simplemente copia la parte que avanza el motor dentro de setup() y pon en comentario (//) la parte del programa cíclica loop().
Para tener más precisión, puedes hacer que el motor de 10 vueltas, para comprobar que finaliza en la posición de inicio.
**********************************************
/*
Stepper Motor Controller
language: Wiring/Arduino
This program drives a unipolar or bipolar stepper motor.
The motor is attached to digital pins 8 and 9 of the Arduino.
The motor moves 100 steps in one direction, then 100 in the other.
Created 11 Mar. 2007
Modified 7 Apr. 2007
by Tom Igoe
*/
// define the pins that the motor is attached to. You can use
// any digital I/O pins.
#include
#define motorSteps 96 // (360/3,75)change this depending on the number of steps
// per revolution of your motor
#define motorPin1 8
#define motorPin2 9
#define ledPin 13
// initialize of the Stepper library:
Stepper myStepper(motorSteps, motorPin1,motorPin2);
void setup() {
// set the motor speed at 60 RPMS:
myStepper.setSpeed(50);
// Initialize the Serial port:
Serial.begin(9600);
// Step forward 100 steps:
Serial.println("Forward");
myStepper.step(96);
delay(500);
}
void loop() {
}
SL2
hola el tutorial esta buenisimo solo que no entiendo la ultima parte del programa de arduino "blink the reset led" que funcion tiene en el programa????
ResponderEliminarHola Jimmy
EliminarSimplemente enciende unas cuantas veces el LED del pin 13 para indicar que ha acabado el ciclo
SL2
muchas gracias Iñigo
ResponderEliminarHola Amigos,
EliminarPrimero deciros que soy nuevo en este interesante mundo de Arduino. Me he decidido y al final he montado la flamante CNC pero tengo un problemilla que no se si me podreis hechar una mano:
El problema creo que lo tengo en el driver de potencia que monte con el chip 754410. Detallo lo que pasa cuando cargo el sketch de prueba (gira a un lado y luego al otro):
1) Si alimento el motor con 12 V (motores NEMA 17 que compre), no giran hacia ningun lado, tan solo hacen un ruido como si estuviesen agarrotados
2) Si alimento con 5V, el motor funciona bien durante 4-5 segundos y luego ocurre lo mismo que si lo alimento a 12V.
Estoy casi seguro de que es del driver de potencia, pero no se que es lo que falla y en consecuencia, no lo puedo solucionar.
alquien me puede echar una mano?
Saludos a todos los apasionados de este mundo y muchas felicidades por el BLog!!
es tu amperaje... revisa el modelo exacto de nema 17 que tengas y busca a que amperaje debe trabajar
EliminarHola Amigos,
ResponderEliminarPrimero deciros que soy nuevo en este interesante mundo de Arduino. Me he decidido y al final he montado la flamante CNC pero tengo un problemilla que no se si me podreis hechar una mano:
El problema creo que lo tengo en el driver de potencia que monte con el chip 754410. Detallo lo que pasa cuando cargo el sketch de prueba (gira a un lado y luego al otro):
1) Si alimento el motor con 12 V (motores NEMA 17 que compre), no giran hacia ningun lado, tan solo hacen un ruido como si estuviesen agarrotados
2) Si alimento con 5V, el motor funciona bien durante 4-5 segundos y luego ocurre lo mismo que si lo alimento a 12V.
Estoy casi seguro de que es del driver de potencia, pero no se que es lo que falla y en consecuencia, no lo puedo solucionar.
alquien me puede echar una mano?
Saludos a todos los apasionados de este mundo y muchas felicidades por el BLog!!
Si se calienta enseguida es que le entra demasiada potencia y suena como una avión, si vibra y no se mueve o va agarrotado es que le entra poca potencia. La mayoría de los chip tienen un tornillito para regular la potencia, si lo giras en sentido contrario a las agujas del reloj hasta que el motor no haga nada, es decir, hasta que lo tienes a 0, luego lo vas girando en sentido de las agujas del reloj hasta que el motor empieza a zumbar, entonces le das un cuarto de vuelta en sentido contrario a las agujas del reloj y así lo tienes a su máxima potencia de trabajo sin que se caliente.
EliminarBuenas noches Iñigo te felicito por tu excelente trabajo realmente sin palabras es de lo mejor, tengo una duda por los llamados pines PWM(función que introduce al algoritmo la modulación por ancho de pulso), el motor paso a paso se puede conectar con el driver para dos hilos, a dos pines que no sean PWM o necesariamente hay que conectarlo a uno o dos de los pines PWM. Ya que te estoy hablando del tema me gustaría saber si el pin de señal de los servos tiene que ser conectado únicamente a los pines PWM, o bien podrían ser conectado a pines que no tengan dicha función, esto lo digo porque en el ejemplo de arduino para mover un servo en sentido horario y anti horario, el pin digital seleccionado es el 9(PWM), pero no se introduce en la estructura de código "analogwrite()" para la activación de tal función, mismo caso que se da en los códigos de los motores paso a paso que se brindan como ejemplos.Gracias y saludos desde Venezuela.
ResponderEliminarEste comentario ha sido eliminado por el autor.
ResponderEliminarhola me llamo nicolás, muy bueno el tutorial, estoy trabajando con un motor simple y para invertir el sentido de giro utilizo este ci L293d, pero noto q para un sentido gira con mucha mas velocidad que en el otro sentido..la verdad es q ya revise las conexiones..y nada..no creo que el programa sea la causa..pero bue..por las dudas te lo mando..kizas vos podes ayudarme.la idea es q apretando un pulsador gire en un sentido y apretando otro pulsador gire en sentido contrario...gracias de antemanoss
ResponderEliminarint switchPin1 = 2;
int switchPin2= 5;
int motor1Pin1 = 3;
int motor1Pin2 = 4;
int enablePin = 9;
void setup ()
{
pinMode (switchPin1, INPUT);
pinMode (switchPin2, INPUT);
pinMode (motor1Pin1, OUTPUT);
pinMode (motor1Pin2, OUTPUT);
pinMode (enablePin, OUTPUT);
digitalWrite (enablePin, HIGH);
}
void loop ()
{
if (digitalRead (switchPin1) == HIGH)
{
digitalWrite (motor1Pin1, LOW);
digitalWrite (motor1Pin2, HIGH);
}
if (digitalRead(switchPin2) == HIGH)
{
digitalWrite (motor1Pin1, HIGH);
digitalWrite (motor1Pin2, LOW);
}
else
{
digitalWrite (motor1Pin1, LOW);
digitalWrite (motor1Pin2, LOW);
}
}
Hola Nicolás,
EliminarEn tu programa el "else" sólo afecta al segundo "if", por lo que si pulsas el switchPin1, el motor arrancará pero instantáneamente se parará ya que tambien se ejecuta el "else" (no has pulsado el switchPin2).
La solucion sería sustituir el segundo "if" por "else if", de forma que el "else" solo se ejecute cuando no has pulsado ninguno de los dos switches.
SL2
gracias IÑIGO!! sabes que antes de ver tu respuesta estaba probando el programa y borre la parte del "else" y anduvo bien..y resulto que funciono con la misma velocidad para ambos lados!!..imaginate, estaba contento con mi maketa de garaje automatizado, meta probar subir voltajes para aumentar la vel de apertura y cierre con una fuente variable, hasta que llegue a 12v, y ese instante fue fatal para mi arduino :(..al parecer se me quemo el micro y ahora no puedo cargar ningun programa, porque aparecen avrdude:verification error, first mismatch at byte 0x0000 0xc != 0xff y el micro empieza a levantar temperatura..asi que por ahora tendre que esperar un tiempo mas para hacer mi tesina..ya voy a encargar otro arduino uno, y un micro atmega328 para ver si puedo resucitar mi arduino..cuando lleguen las voy a continuar con mi maketa...y voy a probar lo que me dijiste...kiero que funcione a control remoto tambien...pero como no tengo quien me guie en estas cosas..veremos..je..gracias desde tartagal, argentina....y seguro vendran otras consultas!! jeje
EliminarGracias, hace tiempo he querido trabajar con los motores paso a paso, pero no había encontrado una buena explicación y tan sencilla, gracias por compartir sus conocimiento, pronto le estaré contando como me fue con los motores paso a paso.
ResponderEliminarSaludos desde Quindío, Colombia.
Puedes mirar mi respuesta de 29 de diciembre de 2011 19:00
ResponderEliminarSL2
Hola
ResponderEliminarTengo un problema y tal vez me puedas ayudar.
Tengo un motor bifásico ( cuatro cables ) y el driver que utilizo es para monofasico ( 6 cables )
¿ es posible utilizar el motor con este driver ?
Muchas gracias
Hola quiero saber si este driver me permite controlar pequeños motores paso a paso de 5v como los que vienen en la CD/DVD rom...y otra cosa, necesito controlar tres motores ( x y z)...eso significa que tengo que hacer tres de estas placas??? Las puedo conectar al mismo arduino? Muchas gracias.
ResponderEliminarHola tengo dos l293c se pueden itilizar o tengo que hacer algunas modificaciones
ResponderEliminarHola gente bueno quería comentar por que tengo unos motores nema 17 y estos drivers http://articulo.mercadolibre.com.ar/MLA-485158269-driver-motor-paso-a-paso-bipolar-3a-16-up-_JM el tema es que no hay forma de que los motores cambién el sentido de giro he verificado en la entrada dir y llega la señal pero nada probé también diferentes programas en arduino y nada alguién le ha pasado esto? no se que hacer.
ResponderEliminarSaludos
hola vereis tengo dos motores de split(aire acondicionado desguace)son de 12v los uso con 2 uln2003a con el esquema de txapu unipolar y los probe con gambas 3 y funcan bien,osea dos ejes y ahora lo dificil,puesto que jody mi l298n me asocie de un floppy(driver)salen 4 hilos,pero para txapu son d1 y d2,y no se como hacer para que sean dos hilos lei algo con un 74sl14 (tengo dm74ls14n es similar,para hacer las inversiones pero no se si funcionara,el driver del floppy es para un motor bipolar que tengo de un scaner epson 12v(mitsuny 320ma),no se si txapu se puede configurar con 4 hilos asi mi cnc o plotter quedaria con 2 unipolares y un bipolar,tambien tengo fabricado un puente h con 4 lm386 y funciona pero como digo son 4 salidas y txapu es d1 y d2,si me echais un cable solo me queda eso para fabricar la cnc,y os pondre videos,gracias
ResponderEliminarperdonar se me olvido decir que tengo arduino r3,la cnc la fabrique con trozos de impresora y mucha masilla epoxy jajajja.tambien mi pregunta es si con el software txapu cnc podria usar 4 salidas para este bipolar asi seria d1 d2 d3 d4,y los dos uln2003a con d1 d2.en fin un lio,si tuviera 3 unipolares(motor) ya estaria rulando.pero los paso a paso que tengo son mejores,tambien tengo motores cc de impresora no se si podria poner 2 unipolares y este para z con cc con un ic uln2003,
ResponderEliminarHola;
ResponderEliminarTengo un bipolar del que quiero hacer un voltímetro para el vehículo (de 8 a 16 voltios). La composición del circuito con L293D la tengo clara, ahora necesito que me indiquen un circuito para construir el cual comandaría el motor mediante las entradas D1 y D2 en función de los distintos valores de tensiones que le llegue.
Muchas gracias.
hola! me gusto mucho tu post, yo realice el mismo crcuito pero al accionarlo tiene una caída de voltaje muy grande ¿Qué puedo hacer para evitarla? gracias por tu respuesta
ResponderEliminarhola esta muy padre tu post muy bien explicado, cres que si pongo optoacopladores en la salida del l293d, podria controlar un motor a pasos de 8 ampers?
ResponderEliminarQuiero hacer un cnc con Arduino , pero tengo un problema con L293D .
ResponderEliminarCuando tres motores están girando , perdieron velocidad y potencia.
¿Podría usted ayudarme por favor .
Estoy usando tres motores steppers 350Am 12v , 3 L293D , 2560 Arduino Mega , 800w 30A ATX PC fuente de alimentación
gracias
http://diymakers.es/wp-content/uploads/2013/12/BIPOLAR-4-FILS.jpg
Cual seria el pin reset en el driver?
ResponderEliminarSaludos, esto me serviria para usarlo con un PLC festo cpx? los pulsos los generaría en codesys con timers y contadores. requiero mover mi motor pap una vuelta a la vez pero cada vuelta aumentando la velocidad.
ResponderEliminarEste comentario ha sido eliminado por el autor.
ResponderEliminarUsei o programa contido para download( sketch arduino) exatamente com o circuito contido nesta pagina e o motor não gira, fica ocilando para os dois lados, alguem testou ja os sketchs? alguem teve algo semeljante? uma ajuda será bem vinda!
ResponderEliminarbuenas a quien le funciono es confiable espero saber una respuesta porfa estoy interesado
ResponderEliminarhola que tal quisiera saver si es necesario hacer ese circuito o se puede conectar directamente al arduino el driver
ResponderEliminarhola que tal quisiera saver si es necesario hacer ese circuito o se puede conectar directamente al arduino el driver
ResponderEliminarHola disculpa yo ando queriendo mover un motor a pasos bipolar y construi tu circuito pero...no me funciona :( ya lo cheque y al parecer todo lo conecte bien. En D1 y D2 coloque un par de push boton pero no me funciona.
ResponderEliminarSigo sin poder mover mi motor, alguien podría ayudarme por favor
ResponderEliminar